

Multi-robot taboo-list exploration of unknown structured environments
Résumé
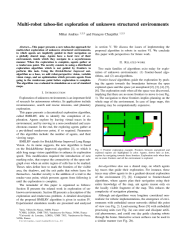
This paper presents a new taboo-list approach for multi-robot exploration of unknown structured environments, in which agents are implicitly guided in their navigation on a globally shared map. Agents have a local view of their environment, inside which they navigate in a asynchronous manner. When the exploration is complete, agents gather at a rendezvous point. The novelty consists in using a distributed exploration algorithm which is not guided by frontiers to perform this task. Using the Brick&Mortar Improved ant-algorithm as a base, we add robot-perspective vision, variable vision range, and an optimization which prevents agents from going to the rendezvous point before exploration is complete. The algorithm was evaluated in simulation on a set of standard maps.
Fichier principal
 2015.07.30_article_Andries.pdf (1.96 Mo)
Télécharger le fichier
IROS_2015.mp4 (5.89 Mo)
Télécharger le fichier
2015.07.30_article_Andries.pdf (1.96 Mo)
Télécharger le fichier
IROS_2015.mp4 (5.89 Mo)
Télécharger le fichier
Origine : Fichiers produits par l'(les) auteur(s)
Origine : Fichiers produits par l'(les) auteur(s)
Loading...